Глава 2. Особые режимы полета на дельтапланах флаттерное пикирование
Предыстория. Уже па заре своего становления дельтапланеризм столкнулся с чрезвычайно опасным явлением - флаттерным пикированием. Наблюдавшие его обратили внимание на потерю устойчивости гибкого крыла и возникновение на нем сильных колебаний - отсюда появилось название "трепещущий флаг". Были отмечены также необычайно большие скорость полета и крутизна траектории, что стало поводом для утверждения об исчезновении в этом режиме полета силы веса и подъемной силы. В то же время попытки пилотов вывести аппарат в нормальный режим полета ни к чему не приводили. Появилось мнение о флаттерном пикировании как о необратимом явлении, прекратить которое пилот самостоятельно не может. Не было ответа на вопрос, почему в одном случае возникает флаттерное пикирование, а в другом нет, почему в одном случае флаттерное пикирование самоисчезает, а в другом нет.
Первым экспериментальные исследования флаттерного пикирования начал проводить в 1974 г. сотрудник швейцарской фирмы "EFE" проф. С. Гоуда. Основной смысл полученных результатов сводится к следующему.
Биконическое гибкое крыло может быть несущей поверхностью только при полностью наполненном куполе. Это происходит на углах атаки выше 13-20°. В этом случае внешние формы гибкого крыла меняются незначительно и оно практически не вибрирует. Вибрации флаттерного типа появляются при уменьшении угла атаки до примерно 18° сначала на концах крыла. С дальнейшим уменьшением угла атаки процесс развивается, колебания паруса занимают все большую часть поверхности крыла и перемещаются вперед, к носовой части. Все это происходит из-за разного характера обтекания сечений крыла по его размаху. На больших углах атаки все сечения крыла обтекаются снизу, хотя местные углы атаки сечений от килевой трубы к концу крыла, как же говорилось, уменьшаются. Поэтому при уменьшении угла атаки крыла наступает момент, когда концевые сечения крыла начинают обтекаться сверху, опадают и, взаимодействуя со стекающим вихрем, начинают вибрировать. Этот процесс с дальнейшим уменьшением угла атаки распространяется на сечения крыла, лежащие ближе к его середине. При критическом угле атаки, равном обычно 10-12°, практически все сечения крыла охвачены сложным колебательным процессом. Кроме того, большая часть крыла опадает и, следовательно, не создает подъемной силы.
Исходя из сказанного, можно предварительно заключить, что полет дельтаплана в режиме флаттериого пикирования не является полетом с полным исчезновением подъемной силы и тем более полетом по баллистической траектории. При флаттерном пикировании сохраняется какой-то остаточный угол атаки, образующий подъемную силу. Тщательные замеры сил и моментов, действующих на гибкое крыло при малых углах атаки, показали [11], что пилоту надо приложить к рулевой трапеции чрезвычайно большое усилие, чтобы вывести дельтаплан из режима флаттерного пикирования. Оно превышает усилие, потребное для управления в обычном планирующем полете, в 10-20 раз!
Имеются еще факторы, усугубляющие опасность флаттерного пикирования (на них указывает Р. Т. Джонс [13]),- необходимость большого запаса высоты для вывода дельтаплана из флаттерного пикирования и достаточно высокие перегрузки, особенно если аппарат не имеет горизонтального оперения.
Центр давления гибкого крыла. Определение аэродинамических характеристик и характеристик продольной устойчивости и управляемости при флаттерном пикировании осложнится значительным влиянием гибкости каркаса крыла и самого паруса.
Мы уже знаем, что отличительными особенностями гибкого крыла являются: перемещение общего центра тяжести при изменении угла атаки, нелинейная зависимость коэффициентов подъемной силы и продольного момента от угла атаки, перемещение центра давления гибкого крыла при изменении угла атаки. Все это оказывает прямое влияние на продольную статическую устойчивость аппарата. Следовательно, корни флаттерного пикирования нужно искать в устойчивости и управляемости! дельтаплана на малых углах атаки.
У обычного жесткого крыла с изменением угла атаки происходит строго определенное перемещение центра давления, поэтому для него можно построить диаграмму перемещения центра давления в зависимости от угла атаки. То же самое можно сделать для гибкого крыла! На рис. 24 изображена такая зависимость, имеющая довольно интересный характер. Слева изображены дельтаплан, фиксируемый под разными углами атаки к набегающему потоку, и действующие на него силы - полная аэродинамическая R и веса G. Круговыми стрелками показаны действующие на гибкое крыло моменты. В центре представлен вид дельтаплана сзади при разных углах атаки. Наконец, справа изображена зависимость перемещения центра давления гибкого крыла по углу атаки (сплошная линия). При углах атаки, расположенных на диаграмме ниже штрихпунктирной линии, гибкое крыло имеет прогрессирующую неустойчивость в отличие от жесткого крыла, характеристика которого нанесена штриховой линией. Почему это происходит?
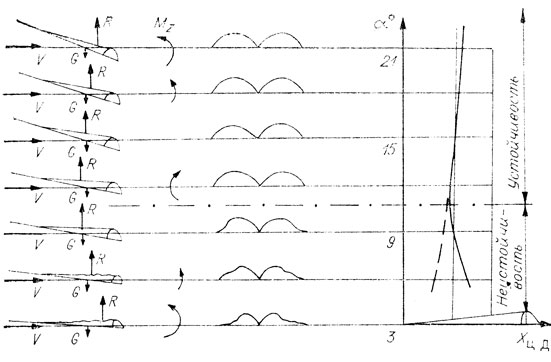
Рис. 24. Качественная картина перемещения центра давления гибкого крыла при уменьшении угла атаки
Для выяснения этого вопроса сделаем небольшое отступление и рассмотрим эффект горизонтального оперения. Хотя конструктивно обычно горизонтального оперения па дельтаплане нет, эффект его тем не менее существует. Как уже говорилось, углы атаки сечений на конце крыла значительно меньше, чем в центральных его сечениях. На больших углах атаки концевые сечения шла обтекаются снизу и вместе с центральными сечениями участвуют в создании подъемной силы. При уменьшении угла атаки в какой-то момент времени углы атаки концевых сечений станут равными нулю. Если процесс уменьшения угла атаки аппарата продолжается, то концевые сечения крыла будут обтекаться теперь сверху, т. е. будут иметь отрицательные углы атаки. Возникшая сила, действующая на эти сечения, направлена вниз, а сами сечения в силу большой стреловидности шла находятся достаточно далеко позади центра давления. Поэтому возникает продольный момент, действующий в сторону увеличения угла атаки. Это и есть эффект горизонтального оперения.
При угле атаки 9-12° в результате сложного взаимодействия аэродинамических сил с массовыми и упругими силами, действующими в ткани, парус начинает вибрировать с высокой частотой. Воздушная сила в этих сечениях исчезает, что ведет к исчезновению продольного момента, препятствующего уменьшению угла атаки. Центр давления начинает перемещаться назад (см. рис. 24), что и ведет к возникновению прогрессирующей неустойчивости и дальнейшему уменьшению угла атаки.
На рис. 25 изображены два аппарата класса "Стандарт" в одинаковых полетных условиях. Аппарат с жестким крылом имеет, естественно, ненарушенный профиль паруса, поэтому при малом угле атаки у него полностью сохраняется эффект горизонтального, оперения. Следовательно, никаких проблем с нарушением устойчивости полета на малых углах атаки с выводом аппарата в нормальный режим полета у него нет. Другое дело - дельтаплан с гибким крылом. Как видно из рисунка, ткань паруса вибрирует, парус в целом потерял обычную форму, выравнивающей силы концевых сечений нет. Этот рисунок, кстати, является копией с документальной фотографии.
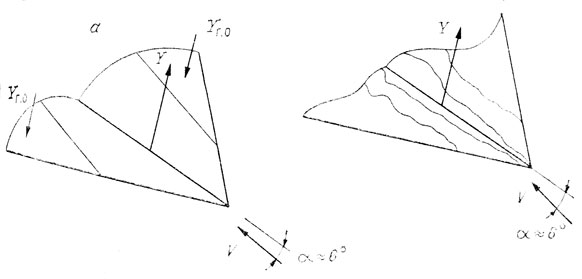
Рис. 25. Пикирование дельтаплана с жестким (а) и гибким (б) крылом
Возвращаясь снова к рис. 24" можно сделать обобщающий вывод. При уменьшении угла атаки от 45 до примерно 10° центр давления гибкого крыла непрерывно перемещается вперед подобно жесткому крылу. Кривая перемещения центра давления крыла по углу атаки имеет левый уклон, что говорит об устойчивости полетам При углах атаки, меньших 10°, характер кривой меняется - она приобретает правый уклон, что указывает на неустойчивость полета, лежащую в основе флаттерного пикирования.
Воздействие веса пилота на угол пикирования дельтаплана. Может ли дельтаплан пикировать вертикальней при условии, что пилот не вмешивается в управление.
На рис. 26 показан дельтаплан, находящийся в аэродинамической трубе. Допустим, что мы пустили трубу и замерили усилия. Подъемная сила при указанных условиях практически равна нулю. Вес пилота составляем 75-80% полетного, поэтому общий центр тяжести расположен вплотную к пилоту. Сопротивление пилота значительно меньше, чем сопротивление крыла. Поэтому вся система неравновесна, так как появится продольный момент, уменьшающий угол пикирования. Следовательно, пикировать строго вертикально в течение даже не очень большого промежутка времени дельтаплан не может, ибо в силу указанных обстоятельств он будет стремиться к какой-то наклонной траектории полета. Вмешательством пилота в управление, как видно из рис. 26, тоже ни к чему не приведет, так как при любых перемещениях тела пилота, ограниченных длиной рук, плечо силы сопротивления пилота практически не изменится.
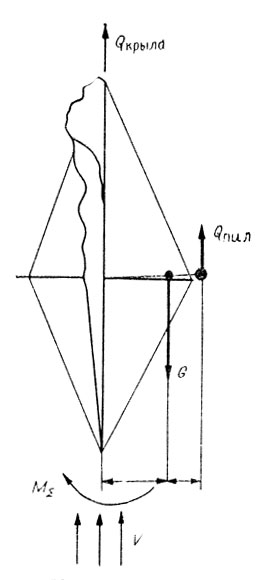
Рис. 26. Возможно ли вертикальное флаттерное пикирование?
Как влияет вес пилота на наклон траектории полетай в режиме флаттерного пикирования (см. рис. 27). Прим увеличении скорости полета уменьшается угол атаки аппарата и одновременно увеличивается угол пикирования. На дельтаплан действуют оба фактора: отличное от жесткого крыла перемещение центра давления и выравнивающий момент от разности моментов сил сопротивлений крыла и пилота. Рис. 27, а изображает дельтаплан, имеющий минимально допустимый угол атаки, сбалансированный в продольном отношении и пикирующий с углом наклона траектории 30°. Если в силу каких-либо причин произойдет уменьшение угла атаки аппарата, как показано на рис. 27, б, то пикирующий момент от перемещения центра давления назад будет превышать кабрирующий* момент от разности моментов сил сопротивлении. В результате угол атаки дельтаплана еще более уменьшится, что вызовет дальнейшее перемещение центра давления крыла назад. Пикирующий момент крыла станет еще больше, то будет способствовать уменьшению угла атаки и т. д. Если считать, что пилот жестко связан с крылом, то одновременно с увеличением пикирующего момента начнет возрастать кабрирующий момент из-за увеличения плеча веса пилота. Вследствие этого тенденция к уменьшению угла атаки замедляется, и при α ≈ 6°, как показано на рис. 27, в, возникает равновесное флаттерное пикирование, при котором пикирующий и кабрирующий моменты уравновешивают друг друга. Если теперь у дельтаплана еще более уменьшится угол атаки, то уже кабрирующин момент будет больше пикирующего, что приведет к увеличению угла атаки до равновесного значения 0°.
* (Положительный продольный момент, увеличивающий угол тангажа.)
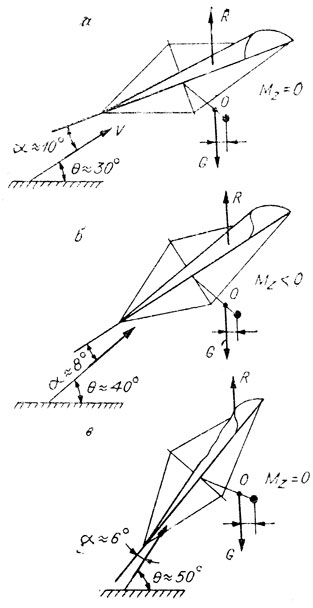
Рис. 27. Полет дельтаплана на малых углах атаки
Описанный процесс характерен для любого гибкого крыла, поверхность которою не подкреплена тем или иным способом. Разным будет только равновесный угол атаки, имеющий значения от 2 до 8° в зависимости от конструктивных особенностей дельтаплана и веса пилота. Таким образом, флаттерное пикирование представляет собой в случае неподкрепленного гибкого крыла очень устойчивый полет по прямолинейной наклонной траектории. Количественно оцепить характеристики такого полета можно только путем численной обработки данных экспериментальных исследований конкретного типа аппарата в аэродинамической трубе.
Управляемость дельтаплана в режиме флаттерного пикирования. Как показала практика полетов, попытки вывести обычные, не оборудованные специальными приспособлениями дельтапланы из флаттерного пикирования в режим нормального полета редко заканчивались удачно. Замечено, что несмотря на отчаянные усилия, прилагаемые пилотами, аппараты обычно не сходили с роковой траектории и со скоростью свыше 100 км/ч под углом около 45° устремлялись к земле.
Это оставалось загадкой до тех пор, пока не были проведены соответствующие эксперименты. Виновником оказалось необходимое управляющее усилие. В области нормальных планирующих полетов оно не превышает нескольких килограммов, в то время как во флаттерном пикировании возрастает в 10-20 [11, 25] раз! Это явление было названо "проблемой усилий". Не всякий пилот физически способен создать такое усилие. Кроме того, есть другая трудность, именуемая "проблемой перемещений". Дело в том, что плечо, на котором действует управляющее усилие пилота - его вес, при разных режимах полета может изменяться в различной степени. При нормальном планирующем полете пилот может отклонить центр тяжести тела на значительно большее расстояние, чем во флаттериом пикировании. При флаттерном пикировании даже пилот с очень большим весом вряд ли способен создать нужный кабрирующий момент вследствие малости плеча, на котором приложен этот вес. Правда, у пилотов есть возможность применить достаточно эффективную меру: встать ногами на ручку трапеции и, ухватясь за килевую трубу позади центрального узла, толкать ручку управления изо всех сил. Прием этот рискованный, поскольку для его выполнения требуется достаточный запас высоты и высокая прочность дельтаплана. Он был впервые продемонстрирован Г. Байярдом при выполнении мертвых петель на специально построенном для этой цели дельтаплане. Такой способ вывода из флаттерного пикирования не может быть осуществлен любым пилотом и на любом аппарате.
Установившийся и неустановившийся полет. Установившийся прямолинейный полет летательного аппарата - это движение с постоянной по времени скоростью. Если она меняется, то полет неустановившийся, например при управляющем действии пилота или при воздушном порыве.
Если бы флаттерное пикирование представляло собой неустановившийся процесс, то для наблюдателя оно показалось бы наклонным полетом со все возрастающей скоростью. Фактически как подобного явления, так и вертикального пикирования на дельтаплане не наблюдалось ни разу. Поэтому траектории флаттерного пикирования следует рассматривать как наклонные тропинки, на которых протекает прямолинейное установившееся движение.
В отличие от установившегося флаттерного пикирования процесс перехода в такой режим полета неустановившийся. При условии невмешательства пилота он протекает 1-3 с, при этом аппарат успевает набрать скорость порядка 100 км/ч и выйти на малые углы атаки. Далее наступает очень устойчивый режим флаттерного пикирования.
Положение тела пилота при устойчивом флаттерном полете. "Проблема перемещений". Эксперименты в аэродинамических трубах позволили сделать очень важный вывод: чтобы устойчиво лететь с заданным углом атаки, пилот должен переместить свое тело в строго определенное положение по отношению к ручке управляющей трапеции. Если для всего диапазона углов атаки рассчитать с достаточной точностью необходимое расстояние от центра тяжести пилота до ручки и затем построить диаграмму перемещение тела пилота - угол атаки, то получится интересная кривая, описывающая основные режимы полета дельтаплана. Ее наклон позволяет судить о продольной статической устойчивости, другие особенности характеризуют управляемость и необратимые состояния полета.
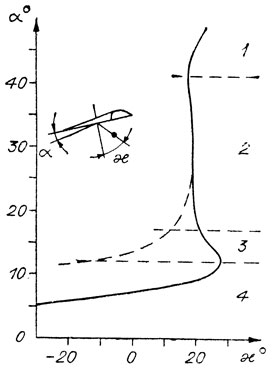
Рис. 28. Диаграмма перемещения пилота. Область: 1 - срыва потока; 2 - нормальных режимов полета; 3 - неустановившегося перехода во флаттерное пикирование; 4 - установившегося флаттерного пикирования
Типичная диаграмма перемещения тела (ДПТ) представлена на рис. 28. Для каждого угла атаки пилот может занять два положения, в которых создаваемый им продольный момент будет один и тот же, в устойчивом планирующем полете общий центр тяжести лежит несколько впереди фокуса и всегда совпадает с центром давления (рис. 29, а). Если центр давления переместился назад, как показано на рис. 29, б, то пилот имеет возможность стабилизировать полет на новом режиме путем отклонения центра тяжести тела на угол χ1. Такого же эффекта, он добьется, отклонив центр тяжести тела на угол χ2. Для нормального планирующего полета второе решение нереально. При флаттерном пикировании оно может быть использовано (пилот ногами становится на ручку трапеции и что есть силы отжимает ее).
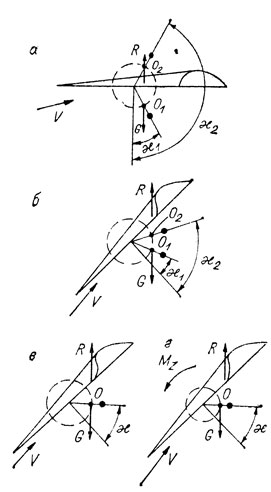
Рис. 29. Влияние длины подвесной системы на продольное управление дельтапланом. а - длинная подвесная система, продольное управление не вызывает затруднений; б - длинная подвесная система и флаттерное пикирование, продольное управление аппаратом ограничено; в - короткая подвесная система и флаттерное пикирование; возможен только один режим устойчивого полета; г - очень короткая подвесная система, случай устойчивого флаттерного пикирования
Длина подвесной системы влияет на продольную устойчивость и управляемость и при флаттерном пикировании. Пусть длина подвесной системы такова, что при максимальном отклонении тела пилота общий центр тяжести может только коснуться центра давления (см. рис. 29, в). В этом случае возможен только один установившийся режим полета. Малейшее отклонение от него в любую сторону приведет к затягиванию во флаттерное пикирование. У пилота нет возможности создать нужный кабрирующий момент. Если еще укоротить трос подвески, как показано на рис. 29, г, то общий центр тяжести при любом перемещении пилота будет находиться впереди центра давления. Следовательно, будет очень устойчивый полет, при котором создать кабрирующий момент невозможно. В результате имеет место случай необратимого флаттерного пикирования.
Статическая эффективность управления. Под статической эффективностью управления следует понимать отношение α = f(χ) или, другими словами, насколько пилоту надо отклонить тело, чтобы угол атаки изменился на требуемую величину. Эта величина может быть получена непосредственно из диаграммы перемещения тела. Физически статическая эффективность управления представляет собой градиент подъема или снижения кривой. Если кривая идет вверх очень круто, то небольшому перемещению тела соответствует значительное возрастание угла атаки, т. е. мы имеем хорошую управляемость. Если кривая идет вверх вяло, то управляющий эффект мал. Далее увидим, что это характерно для флаттерного пикирования.
Все сказанное в этом разделе относится к кривой 7, изображенной на рис. 30. Она показывает, что аппарат - обладает прямой реакцией на управляющее воздействие - большему перемещению тела пилота соответствует и большее увеличение угла атаки. Дельтаплан в этом случае устойчив. Кривая 3 (см. рис. 30) соответствует неустойчивому дельтаплану, поскольку налицо обратная реакция на управляющее действие пилота - большему перемещению тела пилота соответствует уменьшение угла атаки аппарата. Кривая 2 отвечает нейтральному аппарату.
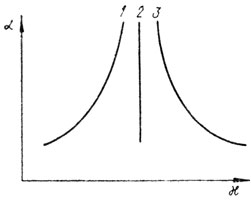
Рис. 30. Статическая эффективность управления
Таким образом, можно констатировать: к устойчивому флаттерному пикированию ведут три основных типа неустойчивости дельтаплана: вследствие "проблемы сил"; из-за "проблемы перемещений тела"; общая неустойчивость. Все они могут быть выявлены с помощью диаграммы перемещения тела по углу атаки.
Диаграмму перемещения тела пилота желательно рассчитывать, руководствуясь не только теоретическими соображениями, но и используя данные продувок конкретного дельтаплана. В ходе расчета задаются: все геометрические данные, вес пилота и аппарата, угол атаки. Используя общие для всех летательных аппаратов аэродинамические зависимости, определяются следующие аэромеханические величины: угол планирования, скорость полета, величина подъемной силы, общее аэродинамическое сопротивление аппарата и пилота.
Следующим этапом расчета является определением внутренних сил, которые надо приложить пилоту для продольного и бокового управления дельтапланом. После этого нетрудно подсчитать величину угла отклонения тела и пропорциональное ему перемещение центра тяжести тела пилота относительно ручки управления. Расчет желательно варьировать, для чего точку подвешивания пилота, длину тросов подвесной системы и соотношение весов пилота и аппарата необходимо сделать переменными величинами.
Предположим, что вес пилота составляет 80% полетного, пилот занимает горизонтальную позицию, дельтаплан - класса "Стандарт". Тогда его ДПТ будет иметь В вид, изображенный на рис. 28, причем характеристикой к гибкого крыла является сплошная кривая, а характеристикой жесткого крыла - штриховая [31].
Кривая для гибкого крыла имеет несколько участков ?с правым подъемом; это говорит об устойчивом состоянии полета. Один такой участок находится в области нормальных углов атаки - от 33 до 20°. В районе 20° ?на крыле начинаются флаттерные явления, поэтому кривые характеристик жесткого и гибкого крыльев расходятся. Как видно из графика, жесткое крыло вплоть до самых малых углов атаки остается устойчивым, хотя эффективность управления падает, на что указывает довольно В пологий характер его кривой при углах атаки от 10 до 5°. У гибкого крыла дело обстоит сложнее. После начала флаттерных явлений крыло стабилизируется на новом режиме, и полет протекает вполне нормально до угла атаки порядка 10°. Здесь будут наблюдаться опадание паруса и потеря продольной устойчивости, поскольку при данном угле атаки кривая приобретает наклон в другую сторону, т. е. аппарат становится неустойчивым. Процесс затягивания в пикирование, как уже говорилось, быстротечен, после чего наступает устойчивое флаттерное пикирование. Эффективность управления в диапазоне углов атаки от 5 до 0° крайне низкая, о чем говорит пологий характер зависимости при этих углах атаки (см. рис. 28).
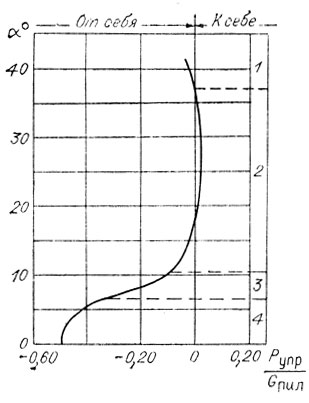
Рис. 31. Зависимость необходимого усилия для продольного управления от угла атаки. Область: 1 - срыва, 2 - нормальных полетов, 3 - перехода во флаттерное пикирование, 4 - установившегося флаттерного пикирования
ДПТ, изображенная на рис. 28, указывает и на то, что сравнительно безопасный полет с углом атаки 12° и устойчивое флаттерное пикирование с углом атаки 6° разделяет угловое перемещение всего лишь в 6°. Отсюда можно сделать вывод, что выйти из флаттерного пикирования можно, поскольку необходимое для этого перемещение пилота вполне приемлемо. Серьезные затруднения может вызвать лишь значительное возрастание требуемого управляющего усилия.
Для нашего аппарата в режиме флаттерного пикирования тоже существует проблема усилий, о чем наглядно свидетельствует рис. 31. При полете в области нормальных углов атаки необходимые управляющие усилия не превышают 4% веса пилота, т. е. 3-4 кг, в то Время как в режиме флаттерного пикирования они возрастают до 50% веса пилота, т. е. более чем в 10 раз!
Пусть вес пилота составит 70% от полетного, всей же остальное останется без изменений. В области нормальных полетов практически никаких изменений не произойдет и диаграмма перемещения тела (см. рис. 28) будет иметь такой же вид, как и для пилота с большим весом. Заметные отличия появляются при угле атаки 10° и ниже. Здесь в фазе перехода к пикированию кривая сильнее выгибается вправо, что говорит о большей неустойчивости полета. Угол атаки устойчивого пикирования становится равным 4°. В этом случае для возвращения в область нормальных полетов потребуется не только приложить значительное усилие, но и переместить тело на большее расстояние назад.
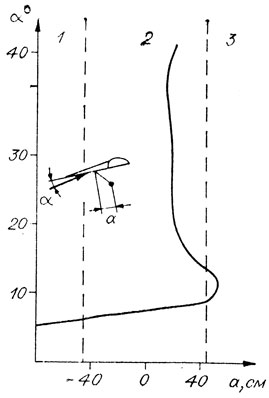
Рис. 32. Зависимость необходимого продольного перемещения тела пилота от угла атаки. 1, 3 - недостижимые диапазоны перемещений; 2 - реальный диапазон перемещений тела пилота
Следует сказать несколько слов и об упоминавшейся проблеме перемещений. На рис. 32 изображена зависимость перемещения рук пилота от угла атаки. При обычных углах атаки необходимое перемещение рук составляет в среднем 10 см назад от ручки. По мере приближения к флаттерному пикированию оно возрастает и даже, как показано на рисунке, выходит за пределы досягаемости рук пилота. Кроме того, как мы знаем, во флаттерном пикировании сильно уменьшается эффективность управляющего воздействия, поэтому при малых углах атаки пилот должен отклонить тело на 10° назад, чтобы добиться увеличения угла атаки всего на 1° (см. рис. 28) [31].
Динамика вывода дельтаплана из флаттерного пикирования. Существующие конструкции дельтапланов и подвесных систем не дают возможности пилотам вывести дельтаплан в режим нормального полета, что в основном и было причиной аварий.
Вывод дельтаплана из флаттерного пикирования зависит от знака и величины продольного момента - он должен быть положительным, прежде всего при нулевой подъемной силе [26]. Для получения подобного эффекта могут быть использованы горизонтальное оперение или хвостовая часть крыла, с помощью конструктивных приспособлений остающаяся отклоненной вверх при опадании паруса на малых углах атаки.
Еще в 1897 г. Ф. Ланчестер исследовал пикирование и волнообразные движения современных ему балансирных планеров. В 1906 г. в книге "Теория парения" он описал эти траектории, назвав их фугоидными. Результатом его исследований явилось заключение о том, что для вывода из вертикального пикирования в горизонтальный полет планер должен потерять высоту, в 3 раза большую, чем это требовалось бы в свободном падении для достижения скорости, равной скорости горизонтального полета, при условии сохранения Cy = const. Опуская предварительные рассуждения и преобразования, приводим формулу для определения радиуса фугоидиой траектории:
Подставляя в нее типичные для дельтапланов нагрузку на крыло p0 = 5 кГ/м2 и коэффициент подъемной силы при выводе из пикирования Cy = 1,0, получим значение радиуса порядка 12 м.
Фактически минимальная высота, необходимая для вывода дельтаплана из флаттерного пикирования, несколько больше, так как Ф. Ланчестер не учитывал таких факторов, как аэродинамическое сопротивление, продольное демпфирование и момент инерции планера. Аэродинамическое сопротивление ведет к небольшому увеличению минимальной высоты (рис. 33), необходимой для вывода дельтаплана из флаттерного пикирования.
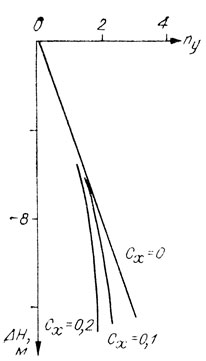
Рис. 33. Влияние аэродинамического сопротивления и нормальной перегрузки на необходимый перепад высот для вывода дельтаплана из флаттерного пикирования
В действительности флаттерное пикирование дельтаплана в силу особенностей гибкого крыла существенно отличается от предсказанного теорией. На рис. 34 приведен рассчитанный Р. Джонсом [13] и проверенный им экспериментально график вывода дельтаплана из флаттерного пикирования (рис. 34). Из графика следует, что обычный аппарат класса "Стандарт" требует для вывода из флаттерного пикирования 35-40 м по горизонтали и до 47 м по вертикали. Ясно, что самым опасным является флаттерное пикирование на малой высоте.
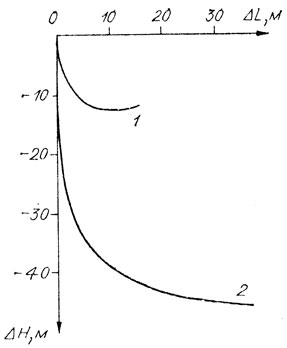
Рис. 34. Траектории вывода из флаттерного пикирования. 1 - дельтаплан с аэродинамическим рулем высоты, отклоненным вверх на 25°, 2 - дельтаплан класса 'Стандарт'
На том же графике приводится кривая, принадлежащая дельтаплану, оснащенному горизонтальным оперением. Конструктивно оно представляет собой цельноворотную профилированную плоскость. При отклонении! оперения вверх на 25° необходимый запас высоты для вывода дельтаплана из флаттерного режима резко уменьшается и составляет всего 13 м, а пройденное при этом расстояние по горизонтали - 10-15 м. Сказанное позволяет сделать вывод о том, что оснащение дельтаплана горизонтальным оперением весьма выгодно.
На большей части траектории сопротивление аппарата является аэродинамическим демпфированием тангажа mzvz [13]. На рис. 35 показано происхождение этого демпфирования. Поскольку при выводе дельтаплана радиус кривизны траектории мал, горизонтальное оперение выходит из кривой траектории полета дельтаплана. Этого достаточно для увеличения угла атаки горизонтального оперения в среднем па 17°. Следовательно, мы получим значительный пикирующий момент, для устранения которого необходимо отклонить цельноповоротное горизонтальное оперение вверх тоже на 17° (тогда оперение не будет создавать никакого момента, поскольку оно находится под нулевым углом атаки к набегающему потоку). Чтобы получить кабрирующий момент, следует отклонить оперение дельтаплана на еще больший угол. Поэтому не надо удивляться тому, что цельноповоротное горизонтальное оперение, эффективность которого очень высока, отклоняется у дельтаплана до 30-35° вверх в отличие от планеров (для последних это значение не превышает 10-15°). Радиус кривизны траектории вывода из пикирования планеров измеряется сотнями метров, поэтому их горизонтальные оперения лежат на той же траектории и имеют то же положение относительно набегающего потока, что и крыло. В результате у них нет необходимости в таких больших отклонениях горизонтального оперения, как у дельтапланов.
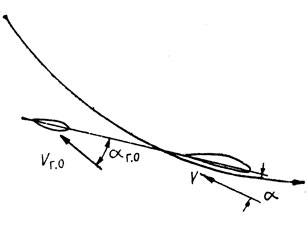
Рис. 35. Механизм аэродинамического демпфирования при выводе дельтаплана из флаттерного пикирования
Продольный момент, необходимый для вывода дельтаплана из флаттерного пикирования. Для следования по к траектории скорейшего вывода из флаттерного пикирования пилот должен создать соответствующий положительный продольный момент путем отклонения тела назад или с помощью горизонтального оперения. Возможно комбинирование этих способов.
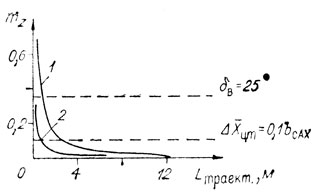
Рис. 36. Соотношение необходимых (сплошные линии) и располагаемых (штриховые) продольных моментов при следовании по траектории скорейшего вывода аппарата из флаттерного пикирования. 1 - момент инерции; 2 - присоединенные массы воздуха
Предположим, что из пикирования выходят два аппарата - балансирный и управляемый аэродинамически. В первом случае пилот отклоняет центр тяжести тела назад на 10% хорды крыла, а во втором - аппарат оснащен цельноповоротным горизонтальным оперением, имеющим Sг. о = 0,1 S, которое пилот отклоняет на 25° вверх. При следовании дельтаплана по траектории скорейшего вывода из флаттерного пикирования в начальный момент времени необходимый положительный продольный момент значительно превышает положительные моменты тангажа, создаваемые как в случае чисто балами сирного, так и аэродинамического управления (рис. 36). Как видно из графика, перемещение центра тяжести пилота назад создает постоянный положительный продольный момент. То же получается и при аэродинамическом способе управления, хотя здесь положительный эффект значительно выше, и, следовательно, можно говорить о предпочтительности аэродинамического управления при выводе дельтаплана из флаттерного пикирования. Кроме того, как доказал У. Филлипс [27], если вывод дельтаплана начинается из положения, когда угол атаки равен нулю, перемещение центра тяжести пилота назад не создает положительного продольного момента.

Рис. 37. Зависимость необходимого для вывода из пикирования перепада высот от продольного момента для дельтаплана, оборудованного рулем высоты
На рис. 37 приведена зависимость необходимого для вывода из пикирования запаса высоты от положительного момента тангажа для дельтаплана, оснащенного горизонтальным оперением с δв = 25°. Как и следовало ожидать, чех выше значение момента, тем меньший запас высоты требуется. Кроме всего прочего, график подтверждает необходимость больших углов отклонения горизонтального оперения.
Действующие перегрузки. Пилот сталкивается при выводе из флаттерного пикирования с увеличением действующей на него перегрузки, так как полет совершается в вертикальной плоскости по криволинейной траектории. Попробуем оценить значение этих перегрузок.

Рис. 38. Зависимость максимальной нормальной перегрузки и максимального коэффициента подъемной силы от продольного момента для дельтаплана, оборудованного рулем высоты
Если бы вывод дельтаплана из пикирования производился по фугоидной траектории Ф. Ланчестера (см. предыдущий раздел), то, по расчетным данным, в нижней точке траектории, соответствующей горизонтальному полету, значение перегрузки составляло бы 3g. В действительности дело обстоит несколько иначе. Рассмотрим данные У. Филлипса [26], который вывел зависимость максимальных значений перегрузки и коэффициента подъемной силы от продольного момента (рис. 38). По графику видно, что существует общая тенденция к увеличению перегрузки при возрастании продольного момента и к уменьшению ее с увеличением аэродинамического сопротивления. При возрастании сопротивления отмечается также заметный прирост подъемной силы, что может быть использовано при разработке приспособлений, способствующих выходу из флаттерного пикирования.
Из графика (см. рис. 38) следует, что максимальное значение перегрузки при реальных значениях коэффициента аэродинамического сопротивления не превышает 3,5g. Для обычного дельтаплана, управляемого перемещением центра тяжести пилота, по данным работы [13], перегрузка составляет 5,5-6,0 g. Это еще раз подтверждает, что при выводе дельтаплана из флаттерного пикирования аэродинамическое управление предпочтительнее балансирного.
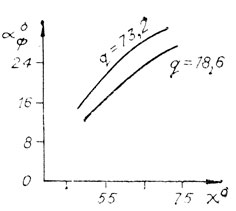
Рис. 39. Границы флаттерного пикирования
Эксперименты показывают, что границы флаттера гибкого крыла зависят от конструкции аппарата и скоростного напора воздуха. На рис. 39 представлено изменение этих границ в зависимости от указанных факторов по данным работы [7].
Обеспечение безопасности полета при флаттерном пикировании. Наиболее целесообразным представляется изготовление крыла с двойной, туго натянутой и образующей в сечении крыла объемный профиль обшивкой. Это уже упоминавшееся парусное крыло, для которого пикирующие режимы полета не представляют непреодолимой опасности. К таким аппаратам относятся A Kestrel, B Kestrel, Bobcat-3. Зафиксированы случаи попадания их в режим флаттерного пикирования, из которого дельтапланы или сами выходили в нормальный горизонтальный полет, или их вывод для пилота не представлял затруднений.
Поверхность крыла, образованного одинарным парусом, надо укрепить латами, имеющими специально подобранный профиль, например Либека.
Хвостовая часть крыла в центральных сечениях должна быть отогнута кверху. Такой S-образный профиль повышает устойчивость дельтаплана в целом и дает возможность вывода его из флаттерного пикирования. Для той же цели служит цельноповоротное горизонтальное оперение, причем его применение, как было показано выше, более предпочтительно.
Тросы подвесной системы должны иметь такую длину, чтобы пилот мог перемещать центр тяжести тела за центр давления для создания положительного момента тангажа.
Конструкция дельтаплана должна иметь соответствующую условиям полета прочность.
Дельтаплан должен быть оборудован парашютом для плавного спуска на землю пилота вместе с аппаратом, если в создавшейся ситуации нет другого выхода.
|
ПОИСК:
|
При копировании материалов активная ссылка обязательна:
http://fly-history.ru/ 'История авиации и воздухоплавания'