Полет на буксире
Для полета на дельтапланах удобна местность, изобилующая разнообразными возвышенностями. Но что делать спортсменам, если они проживают в равнинной местности и до ближайших гор сотни километров? Выход был найден сравнительно быстро - переняли у планеристов идею буксирования. Множество спортсменов в разных странах мира совершают вполне удачные полеты на буксире. Тем не менее статистика несчастных случаев при буксировании производит удручающее впечатление.
Часто причиной несчастных случаев является недостаточно ясное представление пилота о процессах, происходящих во время буксирования. В этой области практика пока опережает теорию - спортсмены своими силами делают лебедки и другие стартовые приспособления, используют для буксирования автомобили, моторные лодки.
Динамика полета дельтаплана на буксире очень сложна при всей своей кажущейся внешней простоте. Дело в том, что такой полет имеет неустановившийся характер. Меняются его скорость, траектория, на дельтаплан действуют трос (его вес, аэродинамическое сопротивление, провисание) и много других факторов. Все это очень сильно усложняет задачу расчета динамики полета дельтаплана. Характер настоящей книги не позволяет проделать такую работу в полном объеме, поэтому ниже будет рассмотрена упрощенная модель полета дельтаплана на буксире. Предварительно наложим некоторые ограничения:
- все силы, действующие на аппарат, приложены в общем центре тяжести, находящемся на киле;
- скорость полета на всей его траектории, включая точку старта, сохраняется постоянной;
- траектория полета изменяется только в вертикальной плоскости;
- угол атаки отсчитывается от килевой трубы;
- влияние веса, аэродинамического сопротивления и провисания троса не принимается во внимание;
- рывки троса отсутствуют и буксирование протекает спокойно.
С учетом указанных ограничений движение дельтаплана имеет одну степень свободы, поскольку он совершает при буксировании полет по предписанной траектории в одной вертикальной плоскости.
Траектория, скорость и высота полета. Применяются два способа буксирования дельтаплана - неподвижными и движущимися средствами. К первым относятся всевозможные лебедки, ко вторым - автомобиль, тяжелый мотоцикл или моторная лодка. Между этими способами существует принципиальное различие, которое, как будет показано дальше, оказывает значительное влияние на характер траектории буксирного полета. При буксировании дельтаплана лебедкой длина троса непрерывно уменьшается, а при буксировании автомобилем - остается постоянной.
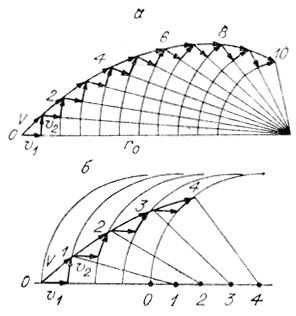
Рис. 40. Траектория полета дельтаплана при буксировании лебедкой (а) и подвижным транспортным средством (б) v1 = v2
Траектория набора высоты с помощью лебедки (рис. 40) представляет собой кривую переменной кривизны. Принятое нами ограничение - постоянство скорости полета дельтаплана по траектории - превращает эту кривую в логарифмическую спираль. Характерной особенностью движения по такой траектории является постоянство угла между направлением скорости полета и В буксировочным тросом (при условии, что этот угол не превышает 90°). В практике планеризма рекомендуется К угол не более 60° для обеспечения безопасности полета.
Скорость полета дельтаплана при буксировании складывается из двух составляющих: скорости наматывания троса на барабан лебедки (v1) и окружной скорости (v2), которую имеет дельтаплан в данной точке траектории. Если v2 = v1, то траектория будет иметь вид, изображенный на рис. 40, а.

Рис. 41. График набора высоты при буксировании лебедкой
Отношение скоростей v2/v1 играет основную роль в достижении максимальной высоты полета. Обратимся к рис. 41. Здесь по горизонтальной оси отложена часть длины троса, намотанная на барабан, а по вертикальной - отношение максимально достижимой высоты к начальной длине троса. При любом отношении скоростей v2/v1 максимальная высота достигается в том случае, когда на барабан лебедки намотано 60% длины троса. Следует отметить, что увеличение скорости полета по траектории позволяет достичь большей высоты, поскольку возрастает отношение v2/v1. После достижения максимальной высоты дельтаплан неизбежно начнет снижаться в силу характера траектории полета. Предотвратить спуск пилот не сможет. Поэтому лучше всего отцепить трос в верхней точке траектории, иначе будет потеряна часть высоты и, кроме того, отцепить трос будет очень трудно.
При буксировании с помощью движущихся средств траектория полета представляет собой циклоиду, поскольку длина троса не меняется (см. рис. 40,6). Скорость (полета по траектории и здесь имеет две составляющие - скорость подвижного буксира v1 и скорость дельтаплана v2, направленная по касательной к образующей окружности (т. е. перпендикулярно тросу). Скорости v1 и v2 не связаны между собой и могут иметь различные соотношения. Если v2/v1 = 1, траектория полета имеет вид нормальной циклоиды (см. рис. 40, б), а максимальная высота составляет около 70% длины буксирного троса. Скорость же дельтаплана относительно воздуха с увеличением высоты будет непрерывно возрастать, что объясняется геометрическим сложением скоростей v1 и v2. В самом деле, если v1 = v2, то F = 2v2 cos θ, поэтому в верхней точке траектории полета, где θ = 0°, скорость полета дельтаплана вдвое превысила бы скорость буксирования. Практически это нереально, и скорость полета по траектории к моменту отцепки троса возрастает всего на 40-60%.
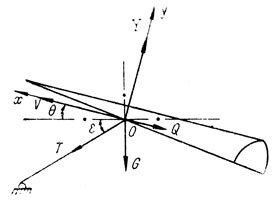
Рис. 42. Схема сил, действующих на дельтаплан в буксирном полете
Силы и перегрузки. Полет дельтаплана на буксире включает следующие элементы: взлет, выдерживание, набор высоты и отцепку. При взлете и выдерживании основная задача пилота - набрать необходимую скорость, не слишком удаляясь от земли; движение дельтаплана является неустановившимся и характеризуется избытком тяги и связанного с ним положительного ускорения. При наборе высоты величина и направление скорости дельтаплана меняются мало, и можно считать, что в любой момент времени действующие на аппарат силы взаимно уравновешиваются, но движение дельтаплана остается неустановившимся, поскольку изменяется траектория его полета. На рис. 42 изображена схема усилий, действующих на аппарат, буксируемый автомобилем или лодкой. Спроецировав эти силы на направление скорости полета и перпендикулярно ему, можно записать уравнения движения по траектории в следующем виде:


где V = 2v2 cos θ при условии, что v1 = v2. Тогда производная  а
а  Подставив все это в уравнения движения и разделив левые и правые части обоих уравнений на G, можно получить выражения для перегрузок ny и nт, действующих по направлениям подъемной силы и усилия буксирования T. После необходимых преобразований получаются зависимости:
Подставив все это в уравнения движения и разделив левые и правые части обоих уравнений на G, можно получить выражения для перегрузок ny и nт, действующих по направлениям подъемной силы и усилия буксирования T. После необходимых преобразований получаются зависимости:
где δ = 4v12/r = 0,06-1,00,причем меньшие значения δ соответствуют малым скоростям буксирования v1 и большой длине троса, а большие - наоборот. Данный диапазон δ соответствует скоростям движения автомобиля от 20 до 40 км/ч и длине троса от 50 до 200 м. Полученные выражения свидетельствуют о том, что для рассматриваемой упрощенной модели буксирного полета дельтаплана по циклоиде перегрузка ny зависит от соотношения углов ε и θ, а также от скорости буксирования v1 и длины троса, в то время как nт зависит только от соотношения углов ε и θ.
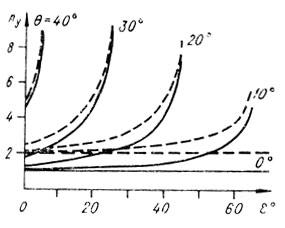
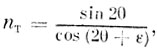
Рис. 43. Зависимость перегрузки ny от параметров траектории буксирного полета
На рис. 43 изображена зависимость ny от углов ε и θ для двух крайних значений δ (δ = 0,06 - сплошная линия, δ = 1,00 - штриховая). Графики показывают, что перегрузка ny растет с увеличением обоих углов, но угол наклона траектории 8 оказывает на этот рост более сильное влияние. Видимо, не имеет смысла стремиться получить угол 8, больший, чем 35-40°, поскольку уже при угле наклона троса ε порядка 5° перегрузка ny интенсивно возрастает и дельтаплан может разрушиться в воздухе. Буксирование аппарата с повышенной скоростью v1 на коротком тросе существенно повышает перегрузку ny, особенно на малых углах ε и θ. По мере возрастания этих углов различие в перегрузке постепенно уменьшается.
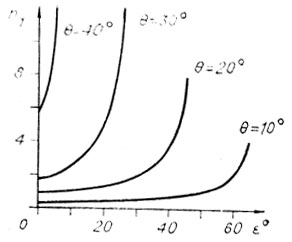
Рис. 44. Зависимость перегрузки nт от параметров траектории при буксировании автомобилем
Перегрузка nт тоже возрастает по мере увеличения углов наклона троса ε и наклона траектории θ (рис. 44), причем угол θ оказывает более сильное влияние. График подтверждает, что нет смысла стремиться достичь угла θ, большего, чем 35-40°, поскольку при этом значение nт сильно возрастает и может лопнуть буксирный трос.
Графики, приведенные на рис. 43-44, выявляют соотношения между параметрами траектории и перегрузками, которые могут возникнуть в буксирном полете, но не позволяют полностью оценить динамику полета дельтаплана на буксире. Представленный в этой главе материал можно рассматривать только как частный случай реального буксирования, когда с течением времени изменяются параметры траектории и соотношения действующих сил.
Как правило, полет на буксире неблагоприятен с точки зрения прочности дельтаплана. Чтобы представить это нагляднее, следует снова обратиться к рис. 42, изображающему схему сил, действующих на аппарат в буксирном полете. В отличие от свободного полета тут имеется сила троса T, которая в сумме с силой веса G по линии действия подъемной силы создает усилие G cos θ + r sin(ε + θ). Для его уравновешивания требуется увеличить подъемную силу крыла. Поэтому при одинаковой скорости полета по траектории подъемная сила буксируемого дельтаплана должна быть выше, чем у свободно летящего. Этого можно добиться только путем увеличения угла атаки. Следовательно, при прочих равных условиях буксирование дельтаплана сужает полетный диапазон углов атаки. Характерно, что пилот в буксирном полете не ощущает перегрузки в отличие от свободного полета по криволинейной траектории и без приборов не сможет определить близость опасных режимов буксирования.
Подведем итог сказанному. При полете дельтаплана на буксире перегрузки ny меньше, а необходимая подъемная сила - больше, чем требуется в свободном полете. Значит, силы веса меньше разгружают крыло дельтаплана, а в случае отрицательных перегрузок ny, возможных при очень больших углах ε и θ, даже догружают его. Следовательно, крыло буксируемого аппарата работает в более тяжелых условиях. Перегрузка ny дополнительно уменьшается во время рывка буксирного троса, что еще более нагружает конструкцию. Запуская дельтаплан, следует помнить об этом и постараться провести буксирование как можно плавнее.
Устойчивость и управляемость. Основное влияние на устойчивость и управляемость дельтаплана в режиме буксирного полета оказывает расположение буксирного замка. Он может находиться на носовом или на центральном узле, или между ними. Если буксирный замок расположен на носовом узле, дельтаплан взлетает нормально при нейтральном положении тела пилота; аппарат не стремится выйти на большие углы наклона траектории G и, как следствие этого, не возникает чрезмерных нагрузок на крыло. Однако пилоту потребуется приложить заметные усилия, чтобы заставить дельтаплан набирать высоту более интенсивно.
Если буксирный замок расположен на центральном узле, дельтаплан может взлететь неожиданно круто и самостоятельно перейти в режим набора высоты с очень большим углом θ, что вызовет резкое возрастание нагрузки на крыло. Поэтому пилоту надо в течение всего буксирного полета подтягивать ручку управляющей трапеции к себе. Усилия, которые ему потребуется приложить, невелики.
Для буксирования дельтаплана лебедкой характерна следующая особенность. Если прямая линия, проходящая через общий центр тяжести и буксирный замок, образует с продольной осью угол, равный углу (ε + θ), получается очень устойчивое в продольном отношении движение аппарата, поскольку он будет стремиться сохранить этот угол постоянным. По мере набора высоты угол наклона траектории θ будет непрерывно уменьшаться на угол наклона троса ε. При изменении угла (ε + θ) линия действия силы T перестанет совпадать с общим центром тяжести и появится продольный момент, который будет стремиться восстановить прежний режим полета. Так как продольное управление затруднено, пилоту надо приложить более значительные усилия для изменения режима полета.
Из сказанного можно сделать вывод, что расположение буксирного замка определяет продольную устойчивость и управляемость в режиме буксирного полета. Лучше всего размещать замок в общем центре тяжести или в непосредственной близости от него, так как в этом случае продольная устойчивость и управляемость дельтаплана почти такие же, как в свободном полете.
Поскольку пилот при буксировании не ощущает фактической перегрузки и, следовательно, не в состоянии правильно оценить угол атаки, при наборе высоты он может создать условия, благоприятствующие возникновению движений дельтаплана вокруг поперечной и вертикальной осей. В первом случае это будет ритмичное продольное раскачивание дельтаплана во второй половине набора высоты. Причиной его являются резкие перемещения пилота вперед-назад, дающие импульс к раскачиванию троса. Погасить движение вокруг поперечной оси можно, сделав такое же движение в противофазе. Во втором случае, чаще всего когда буксирный замок расположен вблизи общего центра тяжести, возникает рысканье дельтаплана при больших угла наклона траектории. Так как пилот не может оценить действительный угол атаки, он, стремясь увеличить угол наклона траектории при сохранении скорости полета по траектории постоянной, превышает критический угол атаки. В результате дельтаплан становится неустойчивым и начинает раскачиваться вокруг вертикальной оси. Погасить рысканье можно путем немедленного уменьшения угла атаки.
Другие факторы, влияющие на буксирование дельтаплана. Кроме рассмотренных, к ним следует отнести мощность буксирующего средства, влияние троса, ветра, аэродинамического качества дельтаплана, отклонение от основного направления буксирования в сторону.
Необходимая мощность буксирующего средства непосредственно зависит от веса дельтаплана и соотношения углов ε и θ, определяющих траекторию набора высоты на буксире. Общая зависимость такова: чем тяжелее аппарат, чем больше угол наклона траектории θ при наборе высоты и чем большей высоты надо достичь, тем больше необходимые усилие буксирования T и мощность буксирующего средства. Это относится к буксированию любыми средствами. По соображениям безопасности не рекомендуется превышать следующие значения углов: θ = 35, ε = 55, (ε + θ) = 60° в случае буксирования лебедкой.
Влияние троса на буксирный полет определяется его весом, аэродинамическим сопротивлением и провисанием. Вес троса в сумме с весом дельтаплана вынуждает увеличивать подъемную силу крыла для обеспечения возможности полета но траектории путем повышения скорости полета или угла атаки, или того и другого одновременно. При этом уменьшается диапазон используемых углов атаки. В то же время необходимое усилие буксирования возрастает, что ведет к увеличению необходимой мощности буксирующего средства.
Провисание троса благоприятно сказывается на буксирном полете, поскольку в этом случае необходимое усилие буксирования заметно уменьшается, а само буксирование протекает более мягко. Разумеется, увеличение прогиба троса не может быть бесконечным, так как при определенной его величине начнется интенсивный рост перегрузок ny и nт из-за увеличения угла ε.
Ветер - исключительно важный фактор для буксируемого дельтаплана. Встречный ветер благоприятен, ибо позволяет снизить нужную скорость движения троса, а следовательно, использовать его длину более рационально. При этом угол наклона траектории θ возрастает до тех пор, пока скорость ветра пе станет равной скорости полета дельтаплана. Тогда дельтаплан обретает возможность взлетать самостоятельно с помощью одного только троса, закрепленного на земле. Для такого взлета достаточно скорости ветра 7-10 м/с, постоянного по направлению. Поскольку длина троса в этом случае величина постоянная, траектория набора высоты будет представлять собой дугу окружности, а сам дельтаплан будет лететь подобно управляемому воздушному змею.
Попутный ветер оказывает на буксирный полет обратное действие - ухудшает условия взлета и набора высоты, делает траекторию полета более пологой и ограничивает максимальную высоту полета.
Боковой ветер создает снос аппарата при взлете, что затрудняет пилотирование.
Как известно, угол наклона траектории θ характеризует аэродинамическое качество дельтаплана в свободном полете. Не вдаваясь в детальные расчеты, можно сказать, что аэродинамическое качество сравнительно мало влияет на угол наклона траектории θ, который прежде и более всего зависит от усилия буксирования T.
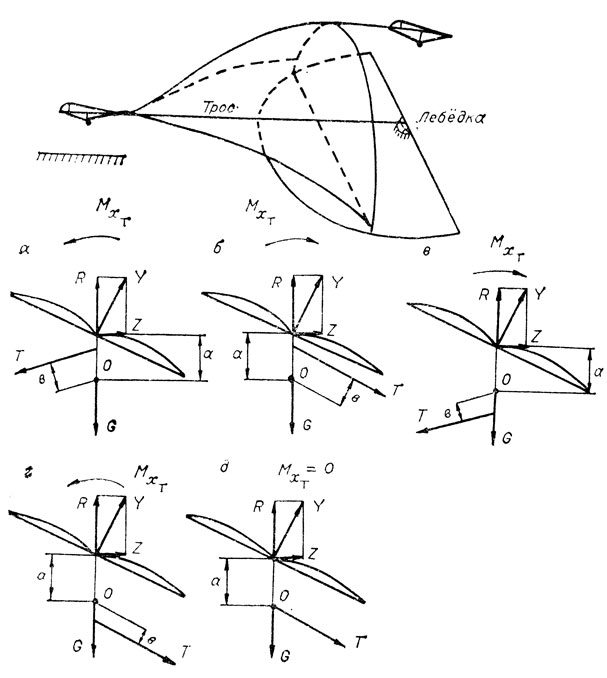
Рис. 45. Диапазон возможных траекторий буксирного полета. Устойчивость дельтаплана
Рассмотрим случай, когда пилот пе просто набирает высоту, перемещаясь по траектории только в вертикальной плоскости, но и совершает маневры, связанные с отходом от основного направления буксирования. На рис. 45 представлены диапазон возможных траекторий такого буксирного полета, а также схемы сил, действующих на дельтаплан в разных положениях его относительно буксира и буксирного замка по высоте относительно общего центра тяжести (ОЦТ). Рис. 45, а изображает дельтаплан, отходящий от основного направления буксирования; у него буксирный замок расположен выше общего центра тяжести. Как видно, в этом случае возникает момент от усилия буксирования T, который стремится устранить крен аппарата. На рис. 45, б показан дельтаплан, приближающийся к основному направлению буксирования; и у него буксирный замок расположен выше общего центра тяжести. В результате также появляется момент от усилия буксирования T, который вместе с поперечным моментом от боковой силы Z стремится еще больше накренить дельтаплан. По мере приближения к основному направлению буксирования момент от усилия T уменьшается. Поэтому можно порекомендовать пилоту, далеко отошедшему в сторону от основного направления буксирования, не делать очень больших кренов в сторону буксира. В целом же размещение буксирного замка выше ОЦТ (в районе центрального узла) вполне допустимо.
Если буксирный замок будет расположен ниже ОЦТ, как показано на рис. 45, в, г, положение резко изменится. По мере отхода дельтаплана от буксира момент от усилия T будет непрерывно возрастать и стремиться опрокинуть аппарат. При определенном значении этого момента пилот не сможет парировать его отклонением своего тела. С приближением дельтаплана к основному направлению буксирования момент от усилия T будет противодействовать управляющему моменту, создаваемому пилотом, т. е. затруднять возвращение. Значит, размещать буксирный замок ниже ОЦТ нежелательно.
Идеальным было бы размещение буксирного замка в ОЦТ, поскольку тогда не возникло бы никаких моментов от усилия буксирования T (см. рис. 45, д). Но положение ОЦТ непостоянно из-за перемещений тела пилота, и оптимальным следует признать размещение буксирного замка несколько выше ОЦТ. В этом случае необходимо лишь установить ограничения на величину предельного отклонения от основного направления буксирования, чтобы сделать полет на буксире вполне безопасным.
|
ПОИСК:
|
При копировании материалов активная ссылка обязательна:
http://fly-history.ru/ 'История авиации и воздухоплавания'