Скорость и дальность планирования
В общем случае на дельтаплан в полете действуют следующие внешние силы (см. рис. 3):
- сила тяжести G, направленная вертикально вниз;
полная аэродинамическая сила R, которую можно представить тремя составляющими вдоль трех осей скоростной системы координат - подъемной силой Y, лобовым сопротивлением Q и боковой силой Z.
Наиболее характерным режимом полета для дельтаплана следует считать установившееся планирование, при котором аппарат снижается по траектории, наклоненной к горизонту под небольшим углом θ. Пусть он летит без скольжения, т. е. отсутствует боковая сила Z. В этом случае условие равновесия требует, чтобы полная аэродинамическая сила R была равна по величине и обратна по направлению весу G. Разложив силу R на ее составляющие Y и Q и спроецировав G на направление движения и перпендикулярно ему, имеем
Разделив второе выражение на первое, получим величину аэродинамического качества
Из этой зависимости следует, что большему аэродинамическому качеству дельтаплана соответствует меньший угол планирования, т. е. при прочих равных условиях в спокойной атмосфере аппарат с более высоким качеством улетит дальше. Отсюда вытекает простейшая широко известная формула;
где Lпл - дальность планирования по горизонтали; K - величина аэродинамического качества; H - перепад высот. Как видно, дальность планирования определяется только аэродинамическим качеством аппарата и перепадом высот и не зависит от веса дельтаплана и плотности воздуха. При изменении веса аппарата или плотности воздуха угол наклона траектории θ и дальность планирования ?пл остаются постоянными. Изменятся только скорость полета по траектории F, скорость снижения Vy и продолжительность планирования. Для подтверждения этого положения выведем формулы названных скоростей, обратившись к рис. 8.
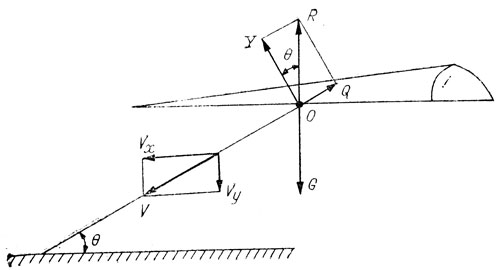
Рис. 8. Установившееся планирование дельтаплана
Прежде всего, примем к сведению одно важное обстоятельство. В практике полетов планеров горизонтальная составляющая скорости полета по траектории значительно превышает вертикальную. Кроме того, более высокие по сравнению с дельтапланами значения аэродинамического качества позволяют иметь малые углы наклона траектории. Да и диапазон положительных углов атаки у обычных планеров значительно меньше, чем у дельтапланов. Поэтому при расчете скоростей планеров принимается, что подъемная сила крыла уравновешивает вес летательного аппарата. Для дельтаплана это предположение неприменимо. Во-первых, его аэродинамическое качество невысоко, что соответствует большему углу наклона траектории. Горизонтальная и вертикальная составляющие скорости полета дельтаплана по траектории сопоставимы. И, во-вторых, он имеет значительный диапазон углов атаки. Поэтому при расчете скоростей следует считать, что вес дельтаплана уравновешивается полной аэродинамической силой (см. рис. 8).
Из подобия треугольников Vx/Vy = Y/Q = Cy/Cx = K, отсюда Vx = KVy. В то же время  Подставив CR в уравнение равновесия R = G, получим
Подставив CR в уравнение равновесия R = G, получим
откуда

при стандартных атмосферных условиях на нулевой высоте. Подстановка значений V и Vx в уравнение для V дает выражение для вертикальной скорости снижения:

Из формул видно, что с увеличением полетного* веса дельтаплана и уменьшением плотности воздуха скорость полета по траектории и скорость снижения возрастают. Продолжительность планирования при этом сокращается (в спокойном воздухе). На практике в воздухе всегда имеются течения разных направлений, и можно говорить лишь о снижении дельтаплана относительно воздуха, поскольку относительно земной поверхности при восходящем воздушном потоке достаточной силы он может лететь не только без снижения, но даже с набором высоты.
* (Под полетным весом следует понимать вес дельтаплана вместе с пилотом.)
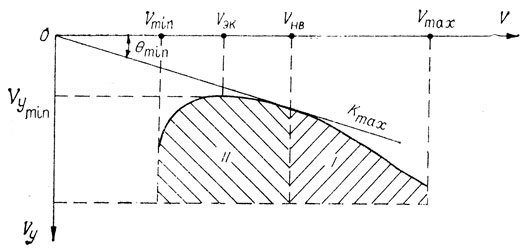
Рис. 9. Поляра планирования дельтаплана
Наиболее полную характеристику планирования дельтаплана дает так называемая поляра скоростей планирования (рис. 9), показывающая соотношение скоростей полета по траектории и вертикального снижения. Она позволяет прямо с графика снять все интересующие нас величины. Значение максимального аэродинамического качества крыла К определяется котангенсом угла наклона касательной, проведенной из точки О к кривой поляры. Другими характерными величинами будут:
- Vmin - минимальная скорость полета (ограничение по сваливанию);
- FЭК - экономическая скорость полета, при которой скорость снижения минимальна;
- FНВ - наивыгоднейшая скорость полета с максимальным аэродинамическим качеством;
- Vmax - максимальная скорость полета (ограничение по флаттерному пикированию).
Точка наивыгоднейшей скорости разделяет на поляре два режима полета. Первый соответствует полету на скоростях, превышающих FНВ. При планировании в области первого режима увеличение угла атаки вплоть до значения, соответствующего наивыгоднейшей скорости, приводит к уменьшению угла планирования вследствие возрастания качества дельтаплана. При планировании в области второго режима картина меняется: с увеличением угла атаки начинается более крутое снижение из-за уменьшения аэродинамического качества (в силу развивающихся срывных явлений). Ухудшается продольная и поперечная управляемость, уменьшается путевая и поперечная устойчивость. С увеличением угла атаки свыше 45°, что соответствует скорости полета, меньшей Fmin, происходит сваливание на крыло или на хвост с последующим беспорядочным падением.
Для планирующих полетов лучше всего использовать скорость первого режима, несколько превышающую наивыгоднейшую. Это позволит совершать дальние и продолжительные полеты.
|
ПОИСК:
|
При копировании материалов активная ссылка обязательна:
http://fly-history.ru/ 'История авиации и воздухоплавания'